Bound Orbits
Having finished Kepler’s laws, you might ask why we need to study the two-body problem any further at all. Well, the idea is similar to why, after learning Coulomb’s law, we still devote a fair amount of time to learning further electrostatics.
The answer is simply practical application. It is much easier to derive some results regarding the system and use them to make our lives easier when solving problems. For instance, you could, theoretically, now that you know , figure out without any of the tools we discuss below, but it would be a much more daunting task.
Anyway, we are still only considering the problem of a two-body system, but we’ll primarily work with bound orbits and see what we can do with them. We’ll also consider secondary effects of gravity, that we’ve largely ignored in our point-mass model.
As we proved in chapter 3.1, all bound orbits are elliptical. Therefore, a fair amount of the following discussion is going to rely on some knowledge of ellipses. You should have ideally finished reading the Wikipedia page or used an equivalent resource.
Consider an ellipse with semi-major axis , semi-minor axis , and eccentricity . As you may know, the semi-major axis is half the length of the longest radius of the ellipse, while the semi-minor axis is half the length of the shortest radius. Here, radius refers to the distance from the center (not the foci) to the boundary.
I’ll just go through some useful results for ellipses that we will need later. I’ll urge you to go through this before proceeding, as it’s vital to the succeeding discussions.
The semi-minor and semi-major axes are related by
The eccentricity of an ellipse is always less than 1, being 0 for a circle. Now, we can use the equation of the ellipse with the origin at one of the foci:
to find the smallest and largest . This gives the length of the periapsis, which is the point closest to the foci, and apoapsis, the point farthest from the foci:
From this, we get the relations
The semi-latus rectum of an ellipse is defined as the distance from the focus to the ellipse along a line perpendicular to the major axis. It is given by
From this, eqns. , ; we get that the total energy and angular momentum of the orbit in terms of and are:
From here on, for all subsections except the last one, we consider the case when , which is the case for, for example, our solar system.
Orbital Velocity
Because we know the value of energy in terms of the parameters now, and the velocity and radius are related by the energy, we can use eqns. and to get the vis-viva equation:
This gives us the velocity of the smaller body at a distance from the larger body. From here you can see that the velocity is maximum at periapsis and minimum at apoapsis, because it roughly depends on . The velocity at periapsis is then (using the expression for that we found earlier):
And the velocity at apoapsis is:
You can see that they’re sort of very symmetric, if we multiply or divide them, one of the term cancels out! This gives us some very nice relations:
As something you should always do when you have a formula with a parameter you can vary, we can ask what the limiting cases of this are. Since is bound between and , let’s see what we can do. is not really a nice case, for one the orbit becomes unbound, and everything diverges. On the other hand, we can talk about precisely!
In the case of a circular orbit, we have . The body therefore moves with a constant speed , called the circular velocity, given by
For the body to escape the gravitational influence of the larger body and become unbound, the total energy of the system must become more than or equal to 0. We can see this through the conservation of energy. Let the initial velocity be . Finally, we need the velocity to be just non-zero to find the minimum velocity. Note that far away, the potential energy goes to . Pairing this up with the fact that is going to be for the minimum velocity, we get that the total energy must be .
So the escape velocity is such that the total energy is . Using the expression for total energy from Kepler’s Laws, and since initially the separation between the bodies is ;
Thus for the smaller body to escape, the minimum velocity needed is:
From eqn. , the time period of the orbit is:
Kepler’s Equation
We know what the equation for is, but what about the position as a function of time? It turns out, that’s a fairly more difficult task, and the neatest way to do this is using anomalies, parameters that describe the motion of our lighter body. As I said when discussing the first law of Kepler, we call the angle between the eccentricity vector and the position vector the true anomaly, .
Note that because the position vector from the center of mass (which is effectively the larger body here) is:
the periapsis occurs at . So the true anomaly, stated in another manner, measures the angle from the periapsis. If we can somehow find the true anomaly as a function of time, our job is essentially done because we already know .
The idea that we use here is to use a fictitious circular body (this is closely related to the fact that elliptical motion is a superposition of two independent circular motions). The mean motion is defined as
Let the instant at which the body was at periapsis be . We define the mean anomaly as the angular distance from the periapsis which a fictitious body would have if it moved in a circle of radius (the semi-major axis length). At any instant in time , it is clearly given by:
As it turns out, our equations become much neater if we ignore the true anomaly, and instead work with the eccentric anomaly. We defined the eccentric anomaly as the eccentric angle of the smaller body in its elliptical orbit (see the figure). In cartesian coordinates with the center of the ellipse being at origin, the equation of the ellipse becomes
The eccentric anomaly in terms of these coordinates is given by
As a consequence, since , and we get that the distance of the smaller body from the larger body (foci of the ellipse) is given by
Now since , comparing it with expression for and that we have, we get that the eccentric anomaly and true anomaly are related by
so that
Using Kepler’s second law, the total area covered by the smaller body in the shaded region (see the previous figure) is:
when it is present at the eccentric angle . Also, since an ellipse is a rescaling of a circle, the area is times the area of . Thus one obtains from some geometry that the area of is:
We then equate these to find the relation between the mean anomaly and the eccentric anomaly as
This is called Kepler’s equation. It is a transcendental equation, and we can solve it using numerical methods.
Using an infinite series expansion, we can solve it exactly:
Using this and the relations we found, the true anomaly (if you so want) and distance from focus too can be obtained in terms of infinite series expansion, given by
And thus we have found .
Radial Elliptic trajectory
A radial elliptic trajectory is a degenerate case of an elliptical trajectory, where the eccentricity is equal to 1 and the angular momentum of the system is zero. The trajectory is a straight line, and the two bodies collide with each other at some point in the trajectory. It is still classified as an elliptic trajectory since the total energy of the system is negative.
Binary Systems
Consider a binary system having two bodies of masses and moving in bound orbits. Both the bodies move in ellipses of equal eccentricities but oriented opposite to each other. Properties of orbits of individual bodies will be labelled with a subscript (e.g. and ), and properties of the trajectory of the separation vector, or the orbit of one of the bodies relative to the other will be written without a subscript (e.g. ).
The semi-major axes are related by the center of mass relation,
Similarily, in the center of mass frame, the speeds are related by
When an elliptical orbit is projected onto a plane, it produces another ellipse. However, the foci of the original ellipse does not project onto the foci of the observed ellipse.
Consider a binary system at a distance from us, inclined at an angle , which is the angle between the plane of the orbit and plane of the sky. and be the true and observed angular semi-major axes. They are related by the equations
The true semi-major axis is given by
Hence Kepler’s third law can be written as
Usually, for a binary system, only the radial velocity of the bodies can be measured. If the trajectory of the binary system is circular, the radial velocity is given by . The maximum radial velocity observed is
If only one velocity () is observable, can be obtained using . Putting this into the equation above, we get
This is the mass function of the binary system. The mass function can be used to determine the mass of the secondary body if the mass of the primary body is known. The mass function can also be used to determine the inclination of the orbit if the masses of both bodies are known. It also sets a lower limit on the mass of :
Note that for such a binary system, the angular velocities of the two masses about the centre of mass are same. To show this, note that the centripetal force is gravity, so we get that,
where is the distance of from the centre. Since the centre is the centre of mass, using , we get that which gives us the angular velocity for the body, as:
A similar derivation for the other primary will give you the same angular velocity.
Tidal Forces
In all of our prior discussions we worked with the ideal model of a body being a point object. This is all fine, because we were analysing the motion of such bodies, and it is very much the case that they’re much smaller than their trajectories.
However, there are secondary effects that arise when we consider the body to be an actual, extended body. For example, the tides on earth. In general, Tidal force is the difference in gravitational attraction between different points on a body, causing the body to be pulled unevenly and as a result are being stretched towards the source of attraction.
Phenomenon caused by tidal forces include:
- Ocean tides and solid-earth tides
- Tidal locking
- Breaking apart of celestial bodies and formation of ring systems within the Roche limit
- Spaghettification of objects near black holes
- Tidal heating of moons and planets

Tidal acceleration does not require rotation or orbiting bodies; for example, the body may be freefalling in a straight line under the influence of a gravitational field while still being influenced by (changing) tidal acceleration. The only condition is of course, that it is in a gravitational field. Similar effects arise from other forces, but we don’t really care about them.
Let’s try to calculate this apparent effect. Consider a spherical body of radius , kept at a distance from a body of mass . Define
- as the position vector of mass on the surface of the sphere relative to the massive body
- as the position vector of mass relative to the center of mass of the sphere
- as the position vector of the sphere relative to the massive body
Since the sphere accelerates towards the massive body with , the force on mass (as seen by an observer on the body) is given by:
The last term is of little relevance, it persists in the absence of while the first two terms arise from the presence of M — the combination of these two additional terms is known as the tidal force , and the acceleration caused is called the tidal acceleration .
Since ,
Usually , so we can take few approximations (essentially the ones we take to find the field of a dipole), which finally give
Consider a cartesian coordinate system with its origin at the center of the sphere, the -axis pointing towards the massive body, and -axis oriented such that lies in the -plane. If the angle is the angle between the -axis and the vector , the tidal acceleration experienced by is
We see that when and are parallel, i.e. lies on the line joining and the center of the sphere, the tidal acceleration is
When and are perpendicular, i.e. lies on the line perpendicular to the line joining and the center of the sphere, the tidal acceleration is
The tidal acceleration is maximum when and are parallel, and minimum when they are perpendicular.
Roche Limit
You might question that if the oceans did experience tidal forces, why don’t they simply break away? The answer is that Earth’s own gravity stops that from happening. It is held together by its own gravity. Of course, if the tidal acceleration was greater than the gravitational force the body exerts upon itself, the body would disintegrate. In fact, there is a specific distance at which this happens, which depends on the various parameters of the primary body which causes the tidal acceleration, and the secondary body held together by its own gravity (think the Sun and Earth for examples).
The Roche limit or Roche radius is the distance from a massive primary body within which a second body held together only by its own gravity, will disintegrate due to tidal forces. The Roche limit typically applies to a satellite’s disintegrating due to tidal forces induced by its primary, the body around which it orbits.
Let , and be the radius, density and mass of the primary (larger) body and , and be the radius, density and mass of the satellite. The satellite is at a distance from the primary. For the satellite to be held together by its own gravity, the tidal force must be less than the gravitational force acting on the satellite. We get the Roche limit when these two interactions are equal.
where is a mass closest to the primary body, on the satellite’s surface. This gives
If we decrease the distance further, the tidal forces overpower the forces that hold together the body. We in particular care about the force at being overpowered because it is the point closest to the primary.
The above expression is for a rigid satellite. For a fluid satellite,
Here along with the tidal forces and the planet’s gravitational force, we also have the centrifugal force acting on the satellite. For the mass on the surface of the satellite to remain in equilibrium, we must have
where is the angular velocity of the satellite. The angular velocity is given by
Substituting this into the equation, we get
Problems
The semi-major axis of the orbit is
Using Kepler’s third law, we have
The eccentricity and semi-latus rectum can be found using
Therefore the rate of area swept is
A man can jump to a height on Earth. This gives the man’s jump velocity to be . Equating it to the escape velocity of the planet, we get
Since , we have
A projectile which starts from the surface of the Earth at the sea level is launched with the initial speed of () and the projecting angle (with respect to the local horizon) of . Ignore the air resistance.
a) The orbit of the projectile is an ellipse. Find its semi-major axis in units of .
b) What is the eccentricity of this elliptical orbit?
c) Calculate the highest altitude of the projectile with respect to the Earth surface
d) Find the time of flight for the projectile.
e) What is the range of the projectile (surface distance between launching point and falling point)?
a) The total energy of the projectile is
Therefore, the semi-major axis is
b) The angular momentum of the projectile is
Thus we get the eccentricity as
c) The apoapsis distance is
Therefore, the highest altitude of the projectile with respect to the Earth surface is
d) To find the time of flight, we find the mean anomaly at the launch and landing points. The eccentric anomaly at the launch point is
The mean anomaly at the launch point is
The eccentric anomaly at the landing point is simply , and the mean anomaly at the landing point is just . Therefore, the time of flight is
e) To get the range of the projectile, we need to find the true anomaly at the launching and landing points. The true anomaly at the launch point is
The true anomaly at the landing point is . Thus the range of the projectile is
Objects falling into a black hole experience immense tidal forces and thus break up like a spaghetti. Spaghettification is the vertical stretching and horizontal compression of objects into long thin shapes in a very strong, non-homogeneous gravitational field, such as that of a black hole. Assume a neutral non-spinning black hole of mass . The gravitational field around it is described by the Schwarzschild metric, the radius of the event horizon being . In the following discussion, however, we will consider that gravity follows Newton’s laws. Assume a non-rotating star of mass and radius orbits the black hole in a circular orbit at a distance . It is known that there is no stable circular orbit for , and there is no circular orbit for .
a) The nearest distance to which the star can approach the black hole before being torn apart due to tidal forces is known as its Roche limit. Find the Roche limit for the star as a function of and . Introduce a dimensionless variable .
b) After the previous subpart, it is hard to let go of the star. No star deserves to be spaghettified! What bounds must obey for the star to \textbf{never} face such a fate.
c) What needs to be the minimum mass of the black hole for the condition obtained in the previous subpart to hold? Introduce a dimensionless variable . Find a relation between and .
d) What are the bounds on and ? Plot the graph with on the y-axis and on the x-axis. You will find that each value of corresponds to 2 intervals for . What is the physical interpretation of this?
a) The tidal force experienced by a particle on the surface of the star must be just enough for the star’s gravity to balance it out. The distance at which this occurs gives us the Roche limit.
Substituting and , the relation we get is
There is no closed-form solution for , however it can be solved numerically. We get .
b) For the star to never spaghettify, we must have , or the Roche limit must lie inside the event horizon. (The star gets eaten as a whole, instead of becoming noodles.)
c) .
Substituting this inequality into the the relation between and , one gets
The mass of the star is . Thus the minimum mass is .
d) Since is defined as the ratio of the star’s Schwarzschild radius to its actual radius, we must have . Furthurmore, for , we must have . The graph vs looks like the following:
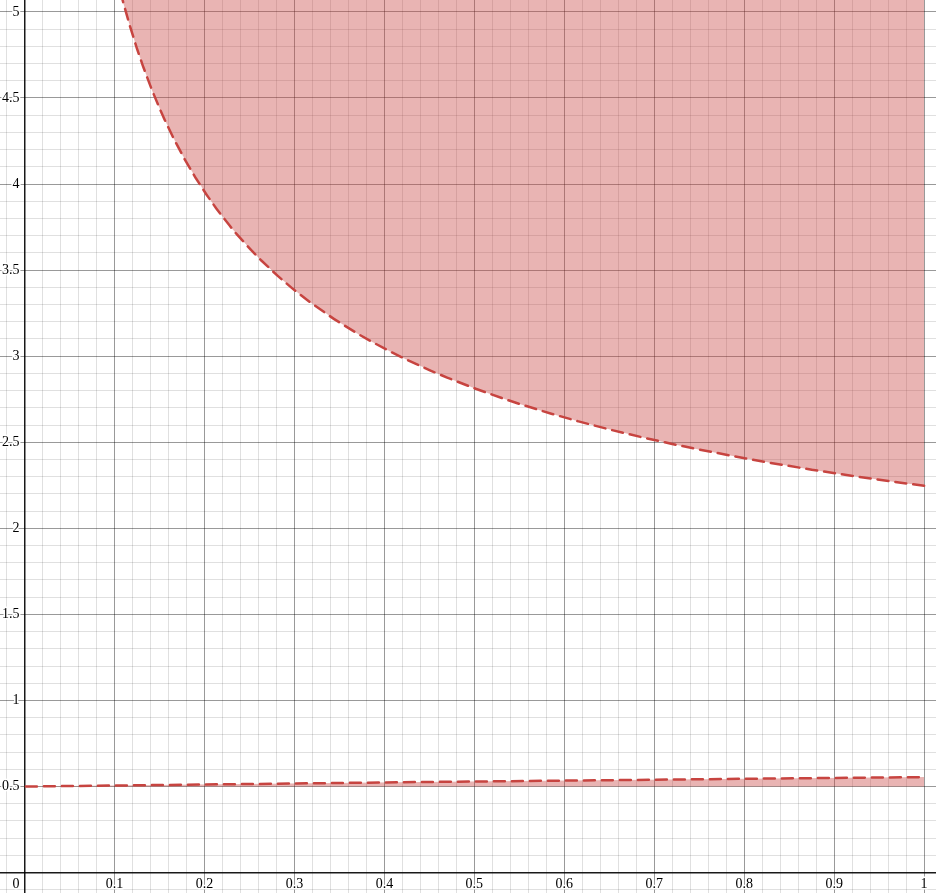
The first interval is the interval of when the black hole lies outside the star. The second interval corresponds to , which is when the black hole’s center lies inside the star, in which case the star still gets engulfed without spaghettifying.
The unshaded area in the graph between the two intervals corresponds to , and thus and , when the star undergoes spaghettification.